6章 学習に関するテクニック
6.1 パラメータの更新
6.1.1 冒険家の話
6.1.2 SGD
mutable struct SGD
lr::Float
end
SGD() = SGD(0.01)
function update(self::SGD, params, grads)
for (key,_)=params
params[key] .-= self.lr * grads[key]
end
end
~
network = TwoLayerNet(...)
optimizer = SGD()
for i = 1:10000
...
x_batch, t_batch = get_mini_batch(...) # ミニバッチ
grads = gradient(network, x_batch, t_batch)
params = network.params
update(optimizer, params, grads)
...
end
~
6.1.3 SGDの欠点
6.1.4 Momentum
~
mutable struct Momentum # """Momentum SGD"""
lr::AbstractFloat
momentum::AbstractFloat
v
end
Momentum(lr=0.01, momentum=0.9) = Momentum(lr, momentum, nothing)
function update(self::Momentum, params, grads)
if isnothing(self.v)
self.v = IdDict()
for (key, val) = params
self.v[key] = zero(val)
end
end
for (key,_) = params
self.v[key] = self.momentum .* self.v[key] .- self.lr * grads[key]
params[key] .+= self.v[key]
end
end
~
6.1.5 AdaGrad
~
mutable struct AdaGrad # """AdaGrad"""
lr::AbstractFloat
h
end
AdaGrad(lr=0.01) = AdaGrad(lr, nothing)
function update(self::AdaGrad, params, grads)
if isnothing(self.h)
self.h = IdDict()
for (key, val) = params
self.h[key] = zero(val)
end
end
for (key,_) = params
self.h[key] .+= grads[key].^2
params[key] .-= self.lr * grads[key] ./ (sqrt.(self.h[key]) + 1e-7)
end
end
~
6.1.6 Adam
6.1.7 どの更新手法を用いるか?
6.1.8 MNISTデータセットによる更新手法の確認
6.2 重みの初期値
6.2.1 重みの初期値を0にする?
6.2.2 隠れ層のアクティベーション分布
import OrderedCollections: OrderedDict
using Plots
function sigmoid(x)
return 1 / (1 + exp(-x))
end
node_num = 100 # 各隠れ層のノード(ニューロン)の数
hidden_layer_size = 5 # 隠れ層が5層
activations = OrderedDict() # ここにアクティベーションの結果を格納する
for i = 1:hidden_layer_size
if i != 1
x = activations[i-1]
else
x = randn(1000, 100)
end
w = randn(node_num, node_num) * 1
z = x * w
a = sigmoid.(a) # シグモイド関数!
activations[i] = a
end
~
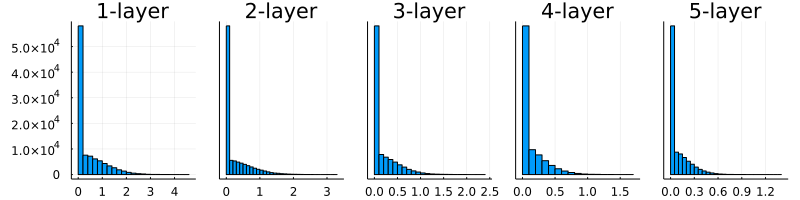
# ヒストグラムを描画
p = []
for (i, a) = activations
push!(p, histogram!(a[:], bins=30, xlim=(0,1), title="$i-layer", leg=false))
end
plot(p..., layout=(1,length(activations)))
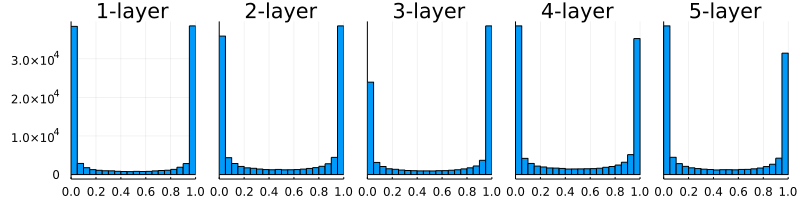
図6-10 重みの初期値として標準偏差1のガウス分布を用いたときの、各層のアクティベーションの分布
~
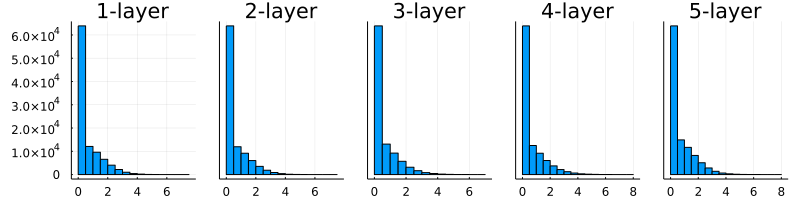
# w = randn(node_num, node_num) * 1
w = randn(node_num, node_num) * 0.01
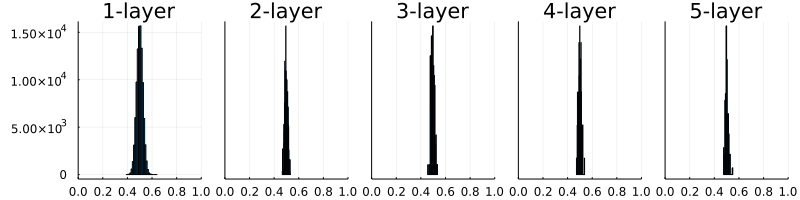
図6-11 重みの初期値として標準偏差0.01のガウス分布を用いたときの、各層のアクティベーションの分布
~
node_num = 100 # 前層のノードの数
w = randn(node_num, node_num) / sqrt(node_num)
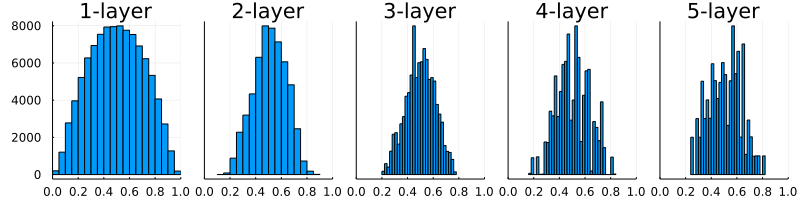
図6-13 重みの初期値として「Xavierの初期値」を用いたときの、各層のアクティベーションの分布
~
6.2.3 ReLUの場合の重みの初期値
~
6.2.4 MNISTデータセットによる重み初期値の比較
6.3 Batch Normalization
6.3.1 Batch Normalization のアルゴリズム
6.3.2 Batch Normalization の評価
6.4 正則化
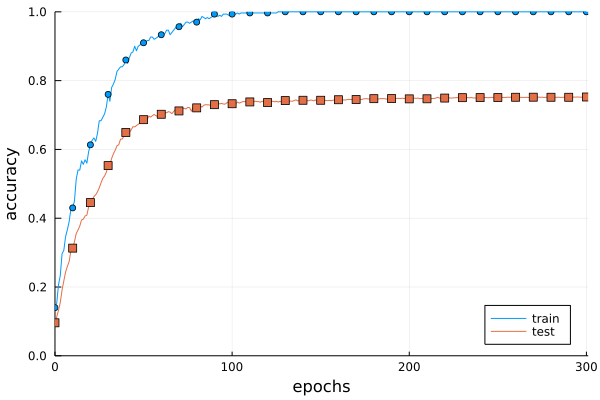
6.4.1 過学習
(x_train, t_train), (x_test, t_test) = load_mnist(normalize=true)
# 過学習を再現するために、学習データを削減
x_train = x_train[1:300, :]
t_train = t_train[1:300]
~
network = MultiLayerNet(784, [100, 100, 100, 100, 100, 100], 10,
weight_decay_lambda=weight_decay_lambda)
optimizer = SGD(0.01) # 学習係数0.01のSGDでパラメータ更新
max_epochs = 201
train_size = size(x_train, 1)
batch_size = 100
train_loss_list = zeros(0)
train_acc_list = zeros(0)
test_acc_list = zeros(0)
iter_per_epoch = max(train_size / batch_size, 1)
epoch_cnt = 0
for i = 0:1000000000
batch_mask = shuffle(1:train_size)[1:batch_size]
x_batch = x_train[batch_mask, :]
t_batch = t_train[batch_mask]
grads = gradient(network, x_batch, t_batch)
update(optimizer, network.params, grads)
if i % iter_per_epoch == 0
train_acc = accuracy(network, x_train, t_train)
test_acc = accuracy(network, x_test, t_test)
append!(train_acc_list, train_acc)
append!(test_acc_list, test_acc)
global epoch_cnt += 1
if epoch_cnt >= max_epochs
break
end
end
end
~
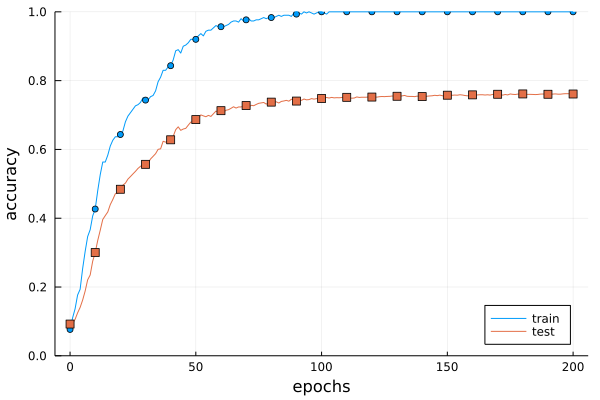
図6-20 訓練データ(train)とテストデータ(test)の認識精度の推移
~
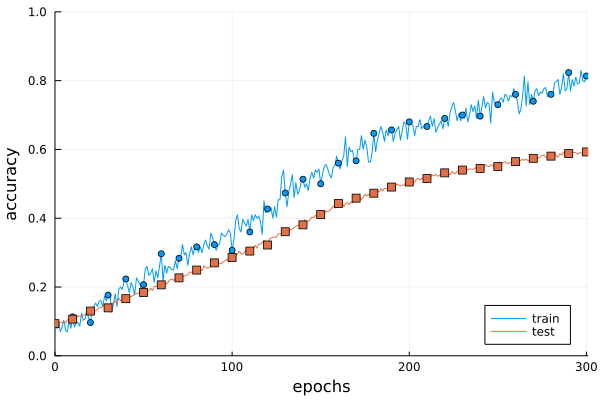
6.4.2 Weight decay
~
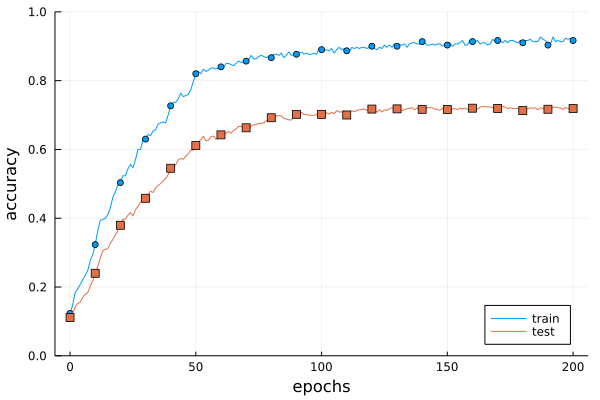
図6-21 Weight decayを用いた訓練データ(train)とテストデータ(test)の認識精度の推移
~
6.4.3 Dropout
~
mutable struct Dropout
dropout_ratio::AbstractFloat
mask
end
function Dropout(dropout_ratio=0.5)
return Dropout(dropout_ratio, nothing)
end
function forward(self::Dropout, x, train_flg=true)
if train_flg
self.mask = rand(eltype(x), size(x)) .> self.dropout_ratio
return x .* self.mask
else
return x * (1.0 - self.dropout_ratio)
end
end
function backward(self::Dropout, dout)
return dout .* self.mask
end
~
~
6.5 ハイパーパラメータの検証
6.5.1 検証データ
~
(x_train, t_train), (x_test, t_test) = load_mnist(normalize=true)
# 訓練データをシャッフル
x_train, t_train = shuffle_dataset(x_train, t_train)
# 検証データの分割
validation_rate = 0.20
validation_num = round(Int, size(x_train, 1) * validation_rate)
x_val = x_train[1:validation_num, :]
t_val = t_train[1:validation_num]
x_train = x_train[validation_num:end, :]
t_train = t_train[validation_num:end]
~
6.5.2 ハイパーパラメータの最適化
6.5.3 ハイパーパラメータの最適化の実装
~
weight_decay = exp10(rand()*((-4)-(-8))+(-8))
lr = exp10(rand()*((-2)-(-6))+(-6))
~
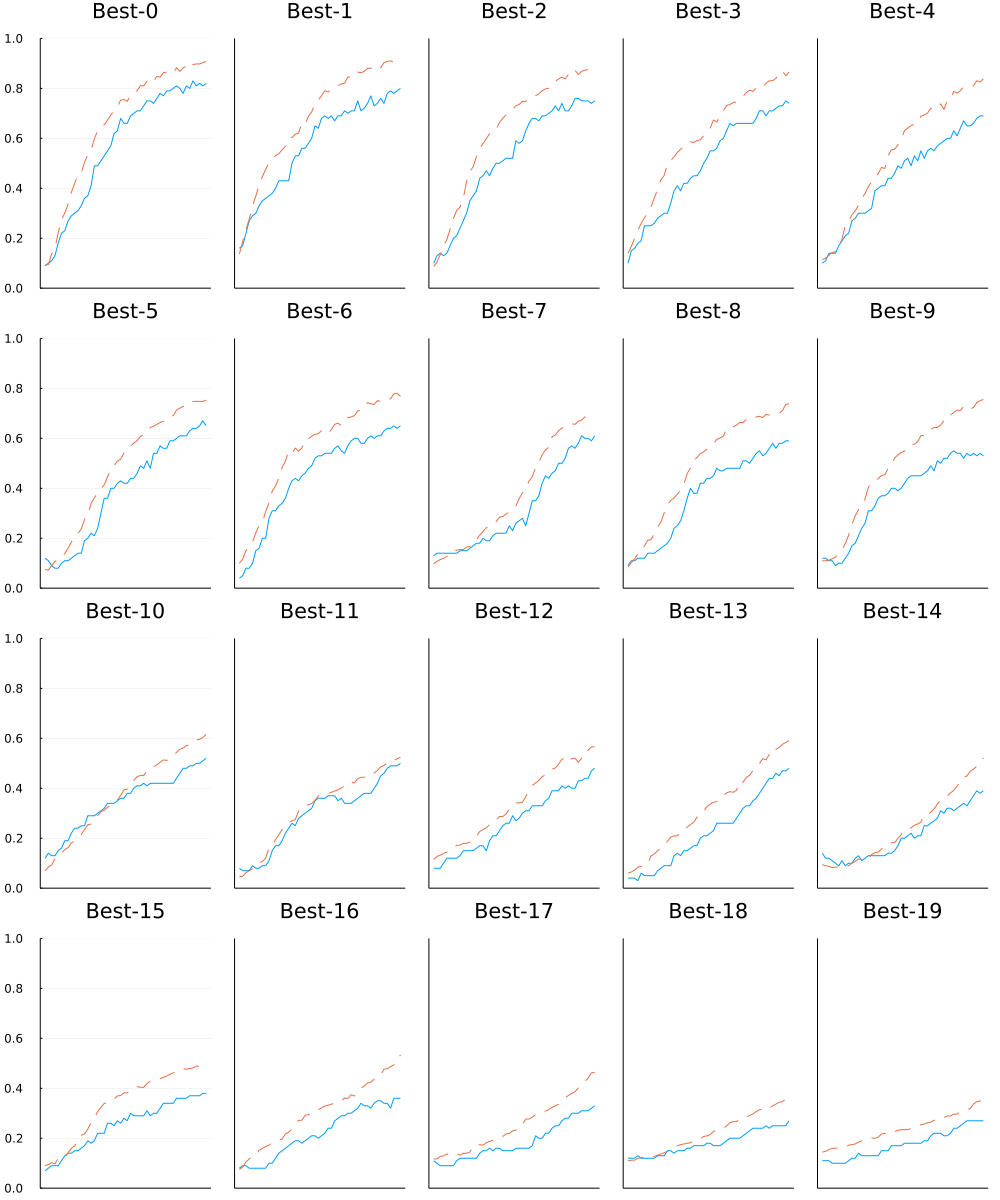 図6-24 実線は検証データの認識精度、点線は訓練データの認識精度
図6-24 実線は検証データの認識精度、点線は訓練データの認識精度
~
Best-1 (val acc : 0.82) | lr:0.009260488167935177, weight decay:5.434206992791276e-5
Best-2 (val acc : 0.8) | lr:0.009792286718596086, weight decay:2.8153724279336563e-6
Best-3 (val acc : 0.75) | lr:0.007121165304873689, weight decay:2.203068790227544e-7
Best-4 (val acc : 0.74) | lr:0.007906392853673758, weight decay:7.987884306758652e-8
Best-5 (val acc : 0.69) | lr:0.005874541870339833, weight decay:5.256434391633917e-6
~
6.6 まとめ
~